KIHT: Kaligo-based Intelligent Handwriting Teacher
KIHT project overview
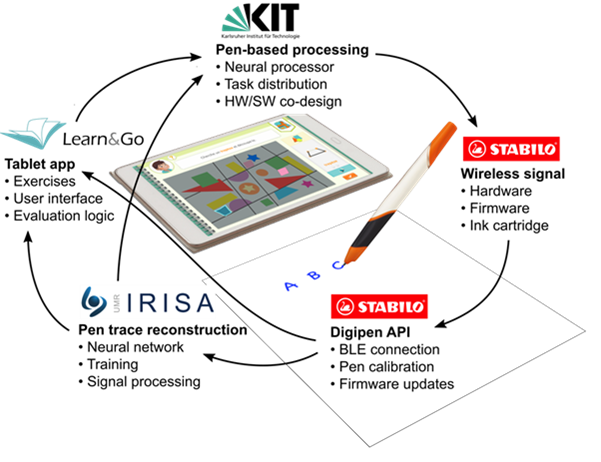
The KIHT
project has the objective of creating an intelligent learning tool known as the "DigiPen,"
which is an electronic pen designed for digitized handwriting. STABILO, in collaboration with
the German KIT institute, is responsible for developing the hardware of the electronic DigiPen.
The KIT institute is focused on integrating artificial intelligence algorithms into the device.
The IRISA IntuiDoc team is in charge of designing and developing the deep learning AI system
that can reconstruct online handwriting patterns from the data captured by the DigiPen's
kinematic sensors, including accelerometers, gyroscopes, magnetometers, and force sensors.
My contribution as an IRISA member
My work has focused mainly on the pre-processing chain for processing, synchronizing and
labeling data (sensor and trajectory) to make it usable for deep neural network learning.
We collected a
significant amount of data using the latest generation Digipen. The pre-processing
chain has been finalized. It is based on automatic alignment between ground truth (trajectory
captured on digital tablet) and DigiPen sensor data (kinematic sensor) using the Dynamic Time
Warping (DTW) algorithm.
A neural network architecture based on Temporal Convolutional Networks (TCN) was designed and
its hyperparameters optimized, and an evaluation based on Fréchet distance was implemented for
optimum analysis of the results.
Related papers
Article in an international peer-reviewed journal
[1] Online handwriting trajectory reconstruction from kinematic sensors using temporal
convolutional network. Wassim Swaileh, Florent Imbert, Yann Soullard, Romain Tavenard, Eric
Anquetil, IJDAR (2023)
[7] Mixture-of-experts for handwriting trajectory reconstruction from IMU sensors. Florent
Imbert, Eric Anquetil, Yann Soullard, Romain Tavenard. Pattern Recognition
Conference Paper
[8] Write on Paper and Get the Online Digital Trace: A New Era for Handwriting. Florent Imbert,
Yann Soullard, Eric Anquetil, Tanja Harbaum, Alexey Serdyuk, Fabian Kreß, Tim Hamann, Peter Kämpf.
22nd Conference of the International Graphonomics Society (IGS 2025).
[6] Florent Imbert, Romain Tavenard, Yann Soullard, Eric Anquetil. Domain adaptation for
handwriting trajectory reconstruction from IMU sensors. ICDAR 2024 Workshops, ADAPDA, Aug 2024,
Athènes, Greece.
[4] Towards the on-device Handwriting Trajectory Reconstruction of the Sensor Enhanced Pen.
Alexey Serdyuk, Fabian Kreß, Micha Hiegle, Tanja Harbaum, Jürgen Becker, et al.. IEEE 9th World
Forum on Internet of Things, Oct 2023, Aveiro, Portugal.
[5] KIHT: Kaligo-based Intelligent Handwriting Teacher. Tanja Harbaum, Alexey Serdyuk, Fabian
Kreß, Tim Hamann, Jens Barth, et al.. DATE 2024, Mar 2024, Valencia, Spain.
Communication at the SIFED symposium in France without proceeding
[2] Toward Deep neural network for pen trajectory reconstruction from kinematic sensors, Florent
Imbert, Eric Anquetil, Romain Tavenard, Yann Soullard, Wassim Swaileh, Symposium International
Francophone sur l’Ecrit et le Document (SIFED’2022), Oct 2022, Rennes, France
[8] Mixture-of-experts for handwriting trajectory reconstruction from IMU sensors. Florent
Imbert, Eric Anquetil, Yann Soullard, Romain Tavenard., Symposium International Francophone sur
l’Ecrit et le Document (SIFED’2024), 2024, Nantes, France
Conference poster at the SIFED symposium in France without proceeding
[3] Adaptation de domaine pour la reconstruction de la trajectoire du stylo à partir de capteurs
cinématiques, Florent Imbert, Eric Anquetil, Romain Tavenard, Yann Soullard, Symposium
International Francophone sur l’Ecrit et le Document (SIFED’2023), Juin 2023, Paris, France
RemoteDeepMango: Deep Learning for the detection, delimitation and
discrimination of trees and
from very high spatial resolution images.
RemoteDeepMango project overview
Agricultural development in developing countries is crucial for poverty reduction and food
security. This development involves deploying innovative digital solutions to acquire
information on agricultural and cropping systems. In West Africa, understanding and modeling
fruit chains is challenging due to a lack of suitable methods and tools for characterizing fruit
tree-based systems, which are often complex (e.g., agroforestry systems).
The RemoteDeepMango project aims to acquire data on mango production at the orchard level to
inform regional production models. This will provide industry players with accurate and reliable
information to meet their needs. The project requires the delimitation and classification of
trees and orchards to provide additional input data to these regional models.
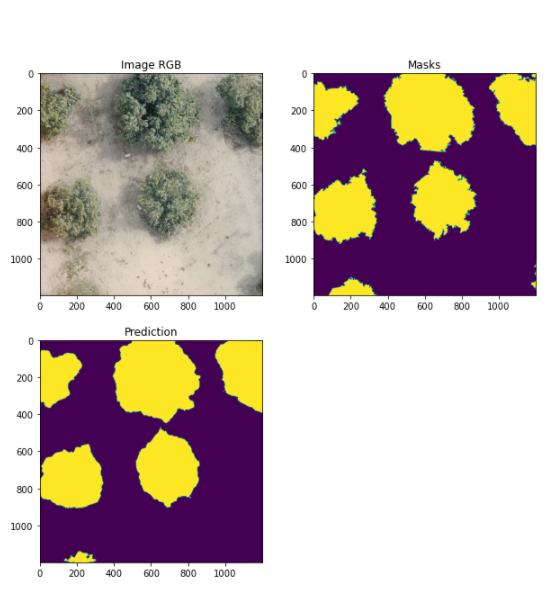
My contribution as an CIRAD member
As a CIRAD member, my work has primarily focused on implementing deep learning neural
classification and segmentation methods to produce cartographic information. The goal was to
identify and map individual mango trees, whether isolated or in orchards, to improve the
accuracy of regional production models.